> 釣魚視頻 > 四海釣魚 > 裝備發燒友
研究人員發現,不同種類的章魚具有不同的觸手錐角。 錐角較大的觸手可以提供更大的包裹力; 而錐角較小的觸手則可以讓章魚在狹窄和受限制的環境中自由活動。 目前,很少有研究圍繞錐角的生物學特性來研究章魚觸手的“纏繞+吸附”功能。
圖1 章魚觸手主要功能分解:包裹+吸附
2月26日,北京航空航天大學李文教授與哈佛大學Katia Bertoldi教授合作團隊在國際期刊《Soft Robotics》上發表最新研究成果“OctopusArm-Inspired Tapered Soft Actuators with Suckers for Improve Grasping”。
本研究根據不同錐度的生物章魚觸手的特點,利用數據統計仿生設計制造出集“纏繞+吸附”于一體的章魚觸手(Tentacle Bot),以達到處理不同尺寸、材質、狹窄空間的目的環境。 有效抓取物體。
北京航空航天大學是該研究的第一單位和第一傳播單位。
研究團隊首先探索了自然界大量生物章魚觸手的形態特征,并從中提取了幾何參數“錐角”。 他們發現自然界中章魚觸手的錐度分布在3度到13.5度之間。
圖2 自然界中不同種類章魚的觸手錐角
為了探究錐角對軟體機器人的影響,研究團隊利用有限元仿真工具對不同錐角的圓錐形軟體機器人進行了分析。
不同錐角下,機器人的彎曲曲率和彎曲力有不同的變化。 研究小組發現,較小的錐角會帶來較大的彎曲曲率和較小的彎曲力。 反之,錐角大則彎曲曲率大,彎曲力小。 實現小彎曲曲率和大彎曲力。
完美的錐角可以抓取不同尺寸和重量的物體。
圖3 利用有限元仿真工具實現:生物→仿生機器人
此外,研究團隊還模擬了章魚吸盤的結構和分布,將圓錐形軟體機器人與軟體吸盤相結合,打造出集纏繞和吸附功能于一體的仿生章魚觸手機器人。 錐形結構和吸盤分別由正壓和負壓控制。 用于控制的壓力發生器。 研究團隊探索了機器人的吸附性能。
研究團隊發現錐角對機器人的吸附功能也有重要影響。 與傳統的圓柱形機器人相比,錐形機器人不僅可以提供更大的最大吸附力,而且在吸盤剝離過程中具有更高的靈活性。 它可以提供更長時間的吸附并且不會很快脫落。 仿生章魚觸手機器人可以實現在不同粗糙度平面上的吸附。
此外,結合彎曲功能,機器人可以調整彎曲角度,實現曲面吸附,進一步擴大了可吸附物體的范圍。
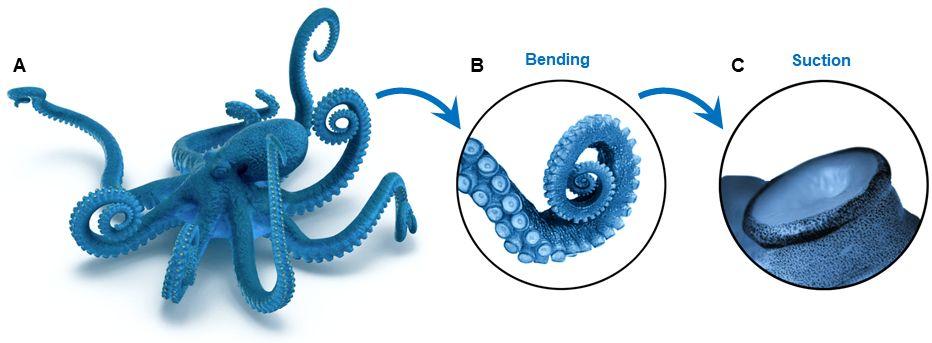
圖4:仿生章魚觸手機器人吸附性能測試
章魚錐形軟件執行器與傳統圓柱形軟件執行器吸附性能
將纏繞和吸附兩種抓取方式相結合,可以讓機器人更加快速、便捷地抓取各種尺寸、材質、重量的物體,從直徑20mm的試管、雞蛋到直徑750mm的瑜伽球。 能夠快速穩定地拾取。
此外,與機械臂結合,機器人可以實現半自主的“吸附-纏繞-轉移-輸送”動作,為工業應用提供了可能。 機器人的錐形形狀使其能夠穿過狹窄的孔并取出內部物體,例如類似于章魚的生物的觸手。
本研究工作提出的糾纏與吸附相結合的抓取方法為軟體機器人提供了新的設計思路,也將為章魚觸手的生物力學機制提供新的認識。
圖片來源:維斯研究所/哈佛大學
該項目得到國家自然科學基金杰出青年項目、重點項目、普惠機器人重大研發計劃、Festo橫向項目等項目的支持。
論文鏈接:
- 上一篇: (釣魚技巧)鯪魚的相關知識以及釣法,值得收藏!
- 下一篇: (釣魚技巧)秋季釣鯽魚,最有特色的釣法!
猜你喜歡
- 2023-11-19 (釣魚技巧)秋季釣鯽魚,最有特色的釣法!
- 2023-11-19 (釣魚技巧)鯪魚的相關知識以及釣法,值得收藏!
- 2023-11-19 鼻涕蟲是什么?的用途是錯的,它是無毒
- 2023-11-19 螃蟹有十只腳,身體被保護著,鰓呼吸呼吸
- 2023-11-19 (釣魚學堂)釣草魚的餌料配方及制作方法!
- 2023-11-19 螃蟹有十條腿,卻是五臟俱全,你知道嗎?
- 2023-11-19 (釣魚技巧)釣草魚的餌料配方,你知道嗎?
- 2023-11-19 釣魚如何調漂找底 釣組靈敏度的大概道理,你們可以這樣想象一下!
- 2023-11-19 周公解夢:做夢好不好?看完你就知道了
- 欄目排行
- 欄目推薦
-
- 熱門tag
- 最新評論
-
 匿名 評論于:09-20
匿名 評論于:09-20
-
匿名 評論于:01-08
-
匿名 評論于:01-06
-
匿名 評論于:01-03
-
匿名 評論于:01-03
-
匿名 評論于:01-01